


7月16日,北京人形机器人创新中心(以下简称“北京人形")正式发布国内首个一站式具身智能公共服务平台,整合“共性技术研发、数据采集训练、中试验证、软硬件测试、产业应用"全链条服务能力,解决行业长期存在的关键共性发展瓶颈,为具身智能产业规模化落地注入新动能。
在从实验室研发迈向多场景应用的过程中,具身智能仍然面临许多待解难题。技术路线分散导致研发资源重复投入,难以形成合力;数据难以互通共享造成"数据孤岛",模型训练效率和泛化能力受限;机器量产断档,使得实验室成果难以转化为稳定可靠的产品;检测缺失则导致产品质量参差不齐,评价标准缺乏统一准绳。诸多关键要素缺失,均需要行业级公共平台提供统一服务。
针对行业技术路线分散、缺乏统一基座导致的研发重复和效率低下问题,北京人形以通用机器人平台“天工"与通用具身智能平台"慧思开物"为核心载体,构建通用机器人软硬件平台。其中,通用机器人平台“天工“聚焦硬件基座,突破了高性能一体化关节、轻量化本体等核心技术,具备稳定灵活的运动能力、精细化操作能力及持久续航能力,为工业场景、物流分拣、特种作业、商业服务等多样化场景提供坚实的硬件基础。通用具身智能平台"慧思开物"则解决了机器人跨本体、跨场景通用系统缺失问题,实现了"一脑多机、一脑多能”,让机器人完成从任务理解、规划到执行的全流程智能化,填补了具身智能通用软件系统的空白,为行业提供强大的“具身大小脑”。
双平台的核心价值不仅在于技术突破,更在于深度开放,通过提供详尽的软件开发文档、结构设计文档、URDF文档和开放接口,使得开发者无需从零构建底层系统,科研机构、高校、企业等可根据具体场景需求灵活定制硬件与软件,从根本上解决了场景碎片化带来的高定制成本难题,显著降低了开发门槛与周期,改善了技术路线分散、重复造轮子的问题,推动形成产业合力,加速打造”最好用“的机器人。
高质量、场景化的数据集是驱动具身智能产业发展的关键,但当前行业面临采集成本高、场景覆盖单一、模型泛化弱等严峻挑战。为此,北京人形正在打造业内首个集成真实场景需求与高保真仿真环境的具身智能数据基地,并联合行业头部企业及大型场景方,共建工业、商业、家庭等超10类实体训练场景,在大型实体空间部署多构型机器人集群,开展规模化数据采集与场景评测,同步设立训练师实训基地培育专业人才,系统性保障数据质量与多样性。
同时,北京人形具身智能数据采集基地以亦庄经开区为战略支点,推进规模化远程遥操作落地,通过远程遥操作技术实现机器人在商业服务、养老护理、特种作业等真实场景的数据采集,并将现场获取的数据实时优化算法模型进行部署,提升机器人在真实作业中的场景适应能力,由此形成"场景采集-模型迭代-能力增强-场景验证”的数据飞轮,为机器人跨场景精确适配提供坚实支撑。
北京人形具身智能数据采集基地将凭借强大的平台工具链与运维中心的坚实支撑,不断优化并拓展数据采集基地的规模与功能,持续丰富场景种类与任务类型,全面提升数据采集的多样性和质量,同时,积极向行业开放共享资源,加速机器人规模化应用于生产与生活领域,引领构建开放协同的具身智能数据生态。

在规模化量产方面,针对当前标准化生产工序缺乏、专用设备缺失、应用测试不完善、生产成本高等问题,北京人形正在建设国内首个具身智能机器人中试验证基地,架起实验室创新与规模化量产之间的关键桥梁。通过部署高精度装配系统,提升机器人本体的装配精度与一致性。同时,构建覆盖从组装到测试全流程的智能管控体系,借助工艺数据追溯与数字化工序图谱,实现生产质量的可量化监控与持续优化,可赋能中小企业与科研团队,大幅降低工艺验证、模组试制的硬件门槛与制造成本,为行业提供了可复制的量产路径,推动行业产业化进程。
为确保中试产品的可靠性与量产可行性,基地构建了“生产-检测"全链路质量闭环。除严控生产过程外,北京人形也建立了软硬件协同的测试体系,系统化开展关键器件与整机的可靠性测试、功能测试、性能测试、安全测试及场景测试。该测试体系涵盖了从零部件到整机的全方位检测,包括对核心零部件的耐久性测试、功能的完整性验证、性能的稳定性评估、安全性的严格检验以及多场景适应性验证,全面保障机器人的质量与性能,确保每台交付的机器人都能直面真实应用的挑战。北京人形还将面向行业开放该测试体系,着力解决行业长期存在的测试无序、标准不统一、认证缺乏等问题。通过构建”检测-认证“全链路支撑体系,建立标准、权威认证,加速技术研发到场景落地的规模化进程。未来,中试基地将通过年产5000台套的验证能力,彻底打通从实验室样机到规模量产的产业断点,加速具身智能技术商业化进程。
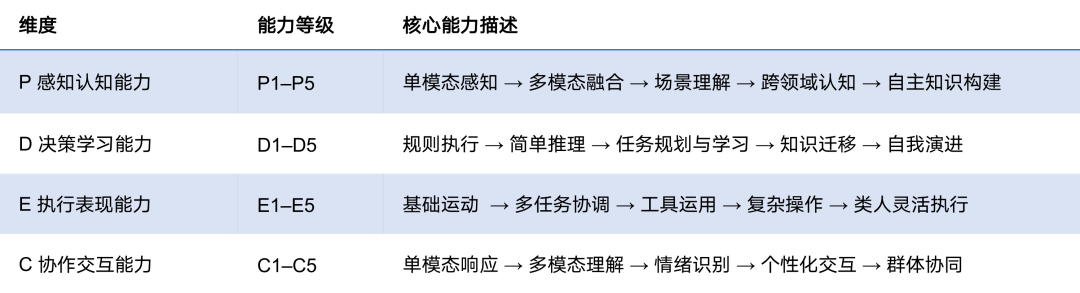
进入规模化应用阶段前,统一、权威的标准也不可或缺。当前行业标准不一、认证缺失的现状,严重制约了产品的可靠性和规模化发展。为破解这一困局,北京人形从核心零部件、核心工具链和整机智能化三个维度构建具身智能机器人标准评价体系。在关键零部件方面,北京人形牵头人形机器人一体化关节接口标准及一体化关节测评标准,攻克了当前人形机器人关节接口不统一、测试无规范的问题,显著减少了工艺验证和模组试制过程中的硬件难度与成本投入,为行业标准化量产提供了可借鉴的范本,加快了具身智能产业化的前进步伐;在数据标准维度,北京人形布局数据标准体系,涵盖数据场建设指南、采集规范、质量评估国标及行标,系统性夯实产业数据根基,为机器人在不同场景下的高效适配与深度学习提供坚实的支撑;此外,北京人形通过牵头制定全国首个具身智能分级标准并为整机提供标准验证与检验检测评价认证双轨服务,为产业提供清、一致的质量准绳。
为降低行业研发门槛、激发创新活力,北京人形还在积极打造国内最具影响力的开源社区,致力于为行业提供开箱即用的企业级具身智能解决方案。在本体方面,北京人形开源了"天工”软件开发文档、结构设计文档、URDF文档等关键技术资料,为开发者提供了硬件平台基础。在运动控制方面,开源了运动控制框架Tien Kung-Lab,将机器人马拉松冠军的运控算法向行业开源,有效解决了高性能人形机器人运动控制框架在开源领域长期缺失的问题,为具身智能机器人在特种作业、智慧物流、商业服务等复杂场景的规模化落地,构建了关键的技术底座。在具身智能数据方面,北京人形联合北京大学推出了大规模多构型智能机器人数据集和Benchmark“RoboMIND”,此数据集在北京人形官网、HuggingFace“平台、北京人工智能公共算力平台累计下载36000余次,为机器人学习领域提供了丰富的数据支持。在开发工具方面,北京人形提供了适配主流开源框架的具身算法训练工具链,简化了开发流程,并上线了功能完备的开源社区平台,构建了全球协作网络。开源社区有效解决了行业以往存在的开发技术成本高、技术迭代缓慢、创新动力不足等问题,为产业的快速发展注入源源不断的动力,为具身智能机器人在更多场景的规模化应用提供有力支持。
北京人形未来还将围绕具身智能全栈技术,逐步开源包括WFM具身世界模型、VLM具身视觉语言模型、VLA视觉语言动作模型、基础全身运动控制模型等一系列核心算法与工具。同时,还将进-步开放和维护更多高质量的数据集,以丰富训练资源。通过开源共享解决行业技术难题,通过开源共享解决行业技术难题,为产业链各环节伙伴提供更强大、更易用的公共技术基座与创新加速引擎。

北京人形立足北京,辐射全国,致力于构建一个开放、协同、创新的具身智能产业生态并通过不断完善一站式具身智能公共服务平台,整合共性技术研发、数据采集训练、中试验证、软硬件测试、产业应用等全链条服务,持续推动技术突破与标准引领,助力我国具身智能产业在全球竞争中占据领先地位,带动行业整体迈向高质量发展的新阶段。