Home
Product
Embodied
Embodied Tien Kung3.0
Tian Yi 2.0
Intelligent
HuiSi KaiWu
Embodied World Model
A Visual Language Model for Robots
Data
Embodied AI Data
Application Scenarios
Video
Open-Source Community
News
About Us
简体中文
English
Language
简体中文
English
Home
Product
Embodied
Embodied Tien Kung3.0
Tian Yi 2.0
Intelligent
HuiSi KaiWu
Wow
PelicanVLM
Data
Application Scenarios
Video
Open-Source Community
News
About
技术及产品
行业赋能
精彩瞬间
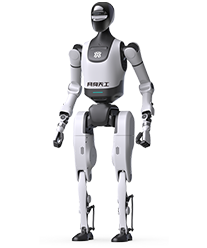
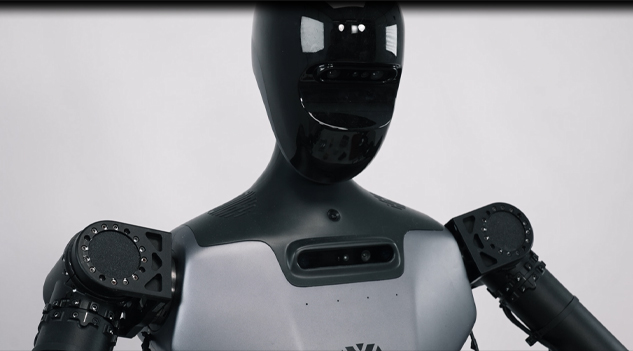
具身天工2.0
通用人形机器人
天轶2.0
通用轮臂式机器人
慧思开物
通用具身智能平台
具身数据
高质量具身智能数据采集训练
Artvip
让现实物品在数字世界重新觉醒
超强运控能力
重新定义机器人运动边界醒
精细泛化操作
解锁全场景智能操作
天悟-Wu1.0
具身智能世界模型
PelicanVLM
为机器人打造的视觉语言大模型
OCC感知导航
自主移动导航避障绕障
赛博员工
多场景多任务多本体协同工作
电力场景巡检
高效完成电力设备巡检操作任务
展厅导览
接待具身导览新范式
物品搬运
跨区域自主导航搬运
工业零部件分拣
实时视觉识别高效分拣
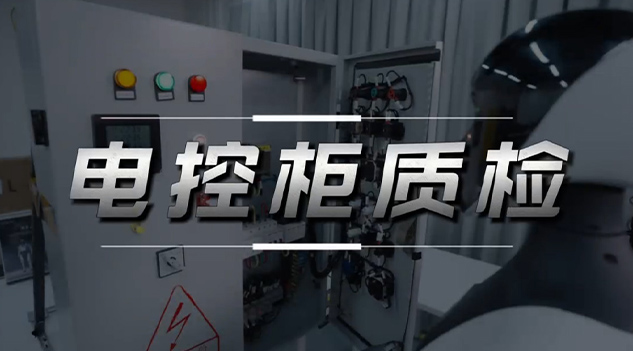
电控柜质检
处理长程任务完成灵巧高精度操作
2025世界人形机器人运动会
全球首个人形机器人半程马拉松
中关村仿生机器人大赛
2025中关村论坛
Top
©️2024 北京人形机器人创新中心有限公司版权所有|
京ICP备2024078606号
|
京公网安备11011202100775号