



4月18日,天工3.0 刚刚拿下全球首个全自主机器人勇士挑战赛冠军,次日,天工3.0又凭借让人印象深刻的外观设计拿下马拉松项目的“最佳设计”奖项,用硬核成绩证明了自己“又帅又能干”。
作为北京人形机器人创新中心(以下简称“北京人形”)最新发布的通用人形机器人平台,天工3.0不仅是行业内首个实现触物交互式全身高动态运动控制的全尺寸人形机器人,也是作为面向未来场景应用的高灵活全尺寸通用人形机器人旗舰平台。天工3.0在整体成熟度、工程完备度与产品体验方面实现了显著的代际跃升,兼具开放性与可拓展性,为二次开发者提供了坚实的平台基础。在本体设计方面,具备以下几方面特点:
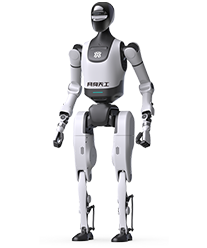
外观造型与仿生美学
天工3.0采用全尺寸拟人化结构设计,身高 1.70 米、体重64.5公斤,全身配置 43 个自由度,比例协调、线条流畅,高度还原人类肢体活动范围与动作灵活性。机身以简约黑白为主色调,科技感与亲和力兼具,视觉辨识度极高,既体现了工业产品的严谨质感,又传递出具身智能机器人的友好属性。关节处采用一体化流线造型,完美融入形态,弱化机械的冰冷感,仿生设计与工业美学深度融合,塑造出兼具力量感与温度感的视觉形象。

功能性外观设计
天工3.0的外观设计 “以功能为核心、以美学为表达” ,将功能性与外观设计高度统一,实现了形式与功能的完美融合。关节布局充分考虑运动力学,高扭矩一体化关节集成于流线型机身内,既保证了肢体爆发力与本体稳定性,又优化了散热与布线设计;传感器、雷达等功能模块巧妙的内内嵌于机身,既不破坏整体造型的完整性,又保障了传感器的功能性。这种的设计思路,让天工3.0这款通用型人形机器人完美融入任何使用场景。

支持全身复杂灵活运动的整机构型方案
髋部采用P-R-Y布置方式,大幅提升腿部运动范围,使机器人能够实现完全俯身下蹲,有效扩大垂直空间可达性与地面操作能力。腰部采用三自由度串联方案,P轴与R轴呈左右布置,紧凑的结构支持机器人实现更加拟人灵活的动作,完成多种复杂全身动作。

轻量化设计技术
应用于机身、足底、头部外壳等部位使用镁合金、碳纤维等高强度、重量轻的材料;基于拓扑优化与有限元分析对本体结构进行优化设计,精准剔除冗余材料,在保持结构刚性的前提下实现极致减重,显著提升了运动性能并降低了能量损耗。

整机高可靠性与高爆发性设计
整机外骨骼结构与胸腔外壳采用高强度铝合金,具备优异的抗冲击与抗摔性能,可在任意姿态下摔倒而无明显结构损坏,具备跌倒后自主爬起能力。机器人可稳定高速持续奔跑半程马拉松21.1公里,结构无异常问题。关节最大扭矩达400N·m,电池最大放电能力为240A,支持机器人实现跳箱子、侧空翻、托马斯回旋等高爆发动作。

可拓展性
为满足二次开发需求,天工3.0配置丰富的硬件接口:手腕处提供CAN×2与RS485×2通信接口,可适配灵巧手、六维力传感器等;机身配备RJ45×2、Type-C×1、USB3.2×2、DP×1、GPS/RTK接口、GPIO×1以及48V/10A供电接口,支持各类传感器、计算单元等外设的灵活接入。

360度环视感知系统
头部搭载Mid-360激光雷达,可选配六个均布摄像头,实现激光点云与多视角图像的时空同步采集与互补感知。通过360度环视感知技术,构建全局环境模型,依托3D激光雷达与摄像头的多模态融合,显著提升动态避障精度、多任务协同能力与环境适应性,支持全自主导航与移动操作。
